
Vertical flying machines such as quadrotors and drones are becoming more and more popular in different aspects of life such as medical emergencies and aerial imaging. Such devices are easy to design and inexpensive to maintain but despite of these great features and its simplicity, quadrotors are unstable in nature and require constant stabilization and monitoring.
Different approaches and multiple controlling systems are reviewed in this project and Mr. Hassan Mansouri as for his B.Eng. final project built a prototype of a quadrotor from scratch in this laboratory.
The final prototype created using the frame by DJI company and an ATMEGA32 microcontroller is presented in figure 1. Figure 2 shows assembled controller circuit of the final prototype.

Figure 1 – The Final Prototype

Figure 2 – Assembled controller circuit of the final prototype
This quadcopter is connected to a controlling station by a wireless connection. A windows application was developed to command/control and monitor the quadrotor in C++ programming language. Figure 3 presents control panel of the ground station console.
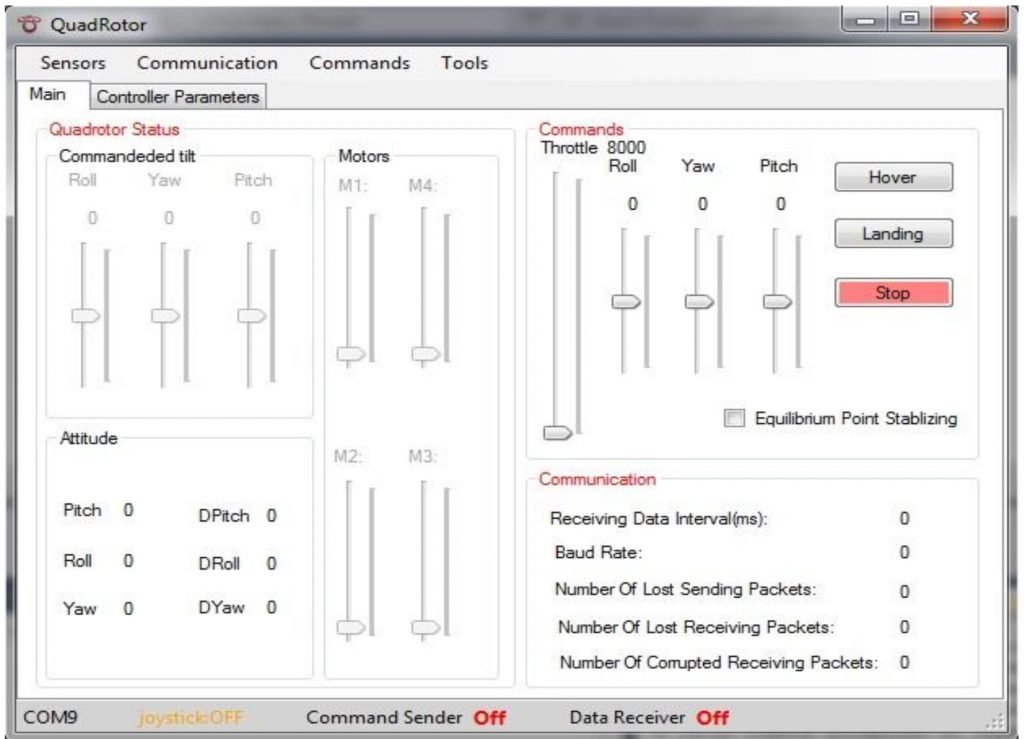
Figure 3 – Snapshot of the control panel designed for the ground station console